
【導讀】在一些場所經常會看到一種平衡電動車的代步工具,被稱為最后一公里神器。其實它的工作原理非常簡單,建立在動態穩定原理上,同樣也是車輛自動平衡能力。下面就詳細介紹自平衡電動車的的工作原理及詳細設計流程。
文中分析了測量角度和角速度傳感器的選擇,通過Atmega16單片機多路信號AD采集陀螺儀和加速度計的信號,經過Kalman濾波算法計算動態的角度和角速度,通過LCD1602顯示角速度和角度的值、轉向值。利用PID控制算法控制自平衡車的平衡狀態,使車體在平衡位置穩定。利用大功率MOS管設計驅動電路,通過單片機有效地控制電機的轉速、電機的轉向,從而有效地控制自平衡車的前進、后退及轉彎功能。
系統總體設計方案
兩輪自平衡自動車采用AVR Atmega16芯片作為主控制芯片,選擇外部16 MHz晶振,使用JTAG仿真器進行實時仿真與調試;采用LCD1602顯示轉彎角度傳感器測量的動態角度和角速度,為了讓調試的過程中更加直觀。動態角度和角速度的測量通過陀螺儀測量角速度,三軸加速度計測量角度。由于平衡車是運動的,所以三軸加速度計測量的角度里面參雜動態角度,最終通過卡爾曼硬件融合電路精確地測量出動態的角度和角速度。
轉向模塊采用高精度電位器,當手把向右偏轉時,兩輪車向右轉,當手把向左偏轉時兩輪自平衡車向左轉彎,可以實現原地轉彎。電機采用直流減速電機,主要是因為直流減速電機能耗低、性能優越、減速機效率高達95%以上,而且振動小、噪音低、節能高、選用優質段鋼材料,鋼性鑄鐵箱體,齒輪表面經過高頻熱處理。節省空間,可靠耐用,承受過載能力高,經過精密加工,確保定位精度,扭矩大。電機驅動模塊采用大功率MOS管,由于電機的功率大,需要的電流大。電機的轉動通過PID控制算法,實現兩輪車的自平衡狀態。系統簡易硬件結構框圖如圖1所示。

圖1 系統簡易硬件結構框圖
車模直立控制方案
兩輪白平衡車的直立是通過負反饋來實現的,但是兩輪自平衡車的直立相對木棒的直立是相對簡單的,木棒的直立是二維的而自平衡車有兩個輪子著地且直立是一維的。所以通過控制輪子的轉動,抵消傾斜的趨勢便可以很好地保持車體直立。兩輪自平衡車模型如圖2所示。
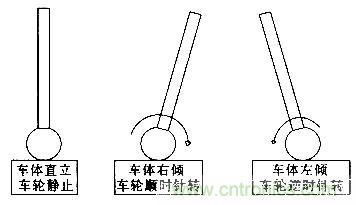
圖2 兩輪自平衡車模型圖
兩輪自平衡車之所以在不加外力的情況下不能夠直立,是因為車體的偏轉方向和受力方向是在同一方向,所以車體會加速倒下,如果要車體直立不倒下那就需要添加外力作用才能夠保持平衡狀態,這個外力就是車輪對地的摩擦力。由于電機在轉動時給地面一個摩擦力,根據牛頓第三定律,地面給車體一個與相對運動方向相反的作用力,這樣才會不至于讓車體加速倒下。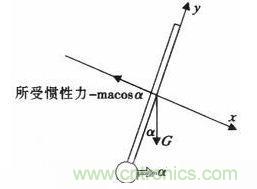
圖3 受力分析圖
兩輪自平衡車的受力分析: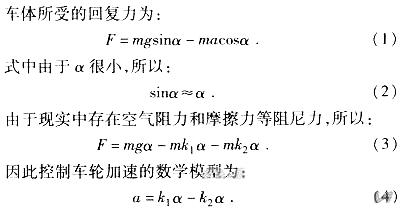
車模行走控制方案
兩輪自平衡車的速度是通過車輪的速度實現的。車輪的速度通過直流電機經過減速箱,增大扭矩。利用直流電機驅動器控制電機的正反轉和PWM調速系統控制兩輪自平衡車的平穩運行。然后通過電機的加速度控制車體的平衡,通過電機的恒定速度和靜止狀態控制車體的勻速運動和靜止狀態。
在運行的過程中當人體的傾角增大時車輪的加速隨之增大以控制車體的平衡,當車體恢復平衡時,以恒定的速度勻速前進。
當轉把轉動時可實現自動復位功能,在轉把的軸徑方向安裝一個大強度的彈簧,使轉把在轉動的過程中自動恢復原位,實現了靈活轉彎的效果,如果轉把的偏向角足夠大可以實現原地轉彎,使兩輪車的運行更加靈活,方便在狹小的地方使用。轉把示意圖如圖4所示。
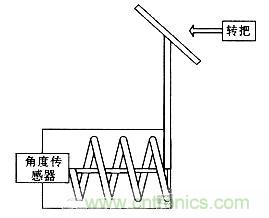
圖4 轉把示意圖
轉把的方向和偏向角是通過高精度電位器檢測的,在轉把的固定軸上安裝個角度傳感器,實現角度的測量。程序流程圖
為了便于程序的開發和以后的使用與維護,全部程序采用模塊化結構,即由一個主程序和若干個子程序模塊構成。主程序首先完成初始化工作,包括定時器初始化、LCD16 02液晶模塊初始化、定時器中斷初始化、系統時鐘初始化、其他參數的初始化等。然后啟動定時器進行定時,開中斷允許單片機響應內部中斷請求。定時器中斷流程圖如圖6所示。各程序功能模塊包括LCD1602液晶顯示、電機驅動、動態角度測量、轉向、欠壓報警等。主程序流程圖如圖5所示。
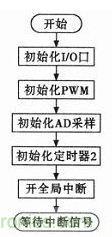
圖5 主程序流程圖
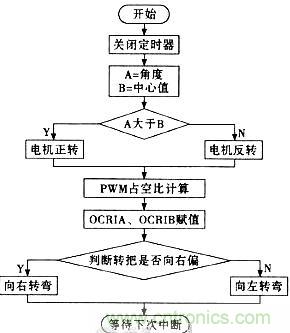
圖6 定時器中斷流程圖
整個系統軟件采用模塊化結構。軟件系統包括:主程序負責顯示。車體直立模塊用定時器1中斷完成,每進入一次中斷完成一次PID算法控制車體平衡,在車體保持平衡狀態的情況下通過采集轉把數據實現轉彎功能。相關閱讀:
電動車的充電設備還能隱藏?技術帝為你解答
為何說無負極電池將顛覆電動車和手機電池?
設計攻略:智能電動車DIY大改造,各種方案玩翻天


